Oder mit minimaler Anzahl an Bauteilen in die Luft – Update 18. April 2013
Einen Quadrocopter kennen vielleicht viele von euch, aber kennt ihr auch einen Nano-Quadrocopter, der nur aus einer einzigen Platine und aus vier Motoren besteht? Wahrscheinlich eher nicht :) Die Idee ist nicht ganz neu und auch nicht meine eigene, trotzdem ist dieser Quadrocopter eine Selbstentwicklung von mir. Der Schaltplan, das Layout, die Lötarbeit und letztendlich die Software; eben alles was dazugehört.
Mein Ziel war es mit möglichst geringem Aufwand und mit sehr wenigen Bauteilen einen Low-Budget Quadrocopter zu bauen, der seinen großen Brüdern in nichts nachsteht. Im Verlauf des Projekts stellte es sich dann allerdings heraus, dass ich mich mit den Ausgaben ein bisschen verschätzt hatte. Es summierte sich im Laufe der Entwicklung schon so einiges auf, was auch daran lag, dass ich mir für dieses Projekt einen Programmier- und Debug-Adapter kaufen musste um eine Möglichkeit zu haben schnell und effizient Fehler im Programmcode zu finden.
Das teuerste Bauteil ist der 4x4mm große Beschleunigungs- und Gyrosensor mit 25€, dementsprechend groß war die Anspannung, als ich die 24 haarfeinen Lötpins des QFN-Gehäuses verlötet habe.
Mit meinem Quadrocopter-Projekt habe ich im Juni 2012 angefangen, als ich ein paar spektakuläre Videos von diversen Quadrocoptern auf Youtube gesehen habe. Hier zum Beispiel ein kleines Video von Nanocoptern, die die Titelmelodie zu James Bond spielen:
Ab da ging es mit dem Projekt langsam aber stetig voran. Ich schaute mich bei ebay nach einem geeigneten RC-Sender und Empfänger um und machte die ersten Entwürfe für die Schaltung. Währenddessen erkundigte ich mich in unterschiedlichen Foren oder bei verschiedenen Webseiten über schon bestehende Quadrocopter-Projekte.
RC-Line Forum
Pi’s Website
Shrediquette
Harald Sattler
Dumm nur, dass mir kein Projekt, bei dem sowohl Software als auch Hardware frei zugänglich war, so richtig auf Anhieb gefiel. Und Projekte, die ich richtig cool fand und bei denen mir auch das Layout und die Einfachheit des Quadros gefielen, waren leider kommerziell, weshalb der Schaltplan und das Platinenlayout nicht für jedermann verfügbar waren.
Also musste der Eigenbau her.
Ich entschied mich für einen 32MHz ATxMega-Prozessor und den Beschleunigungssensor MPU6050 von Invensense, der zwar nicht ganz billig war, aber sehr gute Ergebnisse liefert. Normalerweise wird dieser Beschleunigungs- und Gyrosensor in Smartphones oder Navigationssystemen eingebaut.
Die Eckdaten des Nanocopters im Überblick:
– ATxMega32A4U, 32MHz (er kann alles was das Mikrokontrollerherz begehrt ;))
– MPU6050, 2000 deg/sec Samplingrate
– 340mAh Lion Akku, damit erwartete Flugdauer von etwa 8min
– 4 Miniatur Bürstenmotoren aus Ersatzteilen von einem kommerziellen Nanocopter (Walkera Lady Bird)
Nach vielen, vielen Arbeitsstunden am Computer stellte ich den Schaltplan und das Layout fertig.
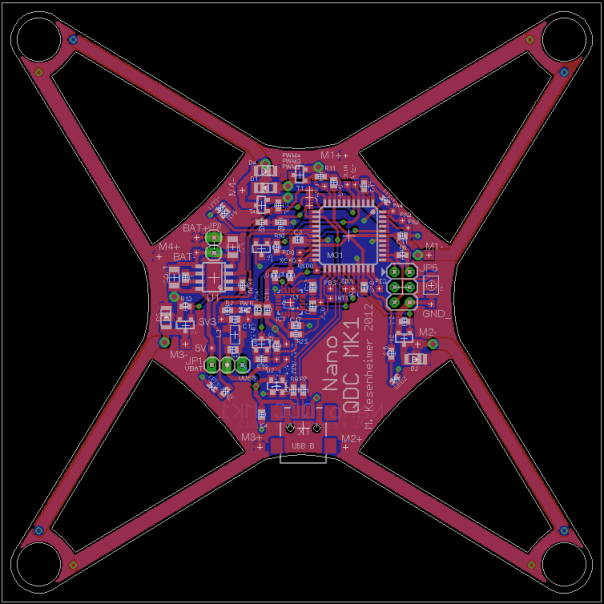
Die Firma Seeedstudio stellte die PCB Platinen innerhalb eines Monats her, weshalb ich viel Zeit hatte in Ruhe die benötigten Bauteile bei Digikey zu bestellen. Als mir nach etlichen Anlaufschwierigkeiten endlich die Bauteile geschickt wurden, konnte ich den Nanocopter nach meinen Fertigungsplänen zusammenlöten.
Das Ergebnis sieht denke ich ganz passabel aus:












Als nächstes wurden die ersten Versuche gestartet für dieses Ding eine Software zu schreiben. Eine I2C Kommunikation zwischen Mikrocontroller und IMU (Beschleunigungs- und Gyrosensor MPU6050) musste aufgebaut, die Motoren über PWM angesteuert und eine PID Regelschleife programmiert werden. Alles nicht so einfach, wie ich mir das am Anfang vorgestellt hatte, aber das folgende Video zeigt, dass mein Projekt doch sehr vielversprechend ist:
In den nächsten Tagen muss ich noch den Empfänger auf den Nanocopter montieren und das Programm für den Empfang der Empfängerdaten erweitern. Wenn alles gut geht, dürfte der Nanocopter in wenigen Wochen flugbereit sein :)
(Aber ich kenne diesen Satz langsam von mir, und aus den Wochen werden Monate…)
Sobald die Software fertig ist, werde ich sie hier veröffentlichen, da ich mich mit der Software nahe an ein schon bestehendes Quadrocopterprojekt (MultiWii) gehalten habe, das ebenfalls unter der GNU-Lizenz steht. Wer vorab schon einen Blick hineinwerfen möchte, kann auf meiner Github-Seite vorbeischauen:
Update 18. April 2013
Endlich! Die Software womit ich auf die Daten meines Nanocopters zugreifen kann funktioniert!
Es war ein langer Weg bis zu dieser Software, vor allem weil ich mich bisher nicht mit Cocoa und Objective-C auskannte. Wie im Video zu sehen ist, werden die Winkel der Nick- und Rollachse auf einem Graph ausgegeben. Die Videoqualität ist zwar nicht so gut, aber ich glaube man erkennt so einigermaßen, was die Software macht. Geplant ist in nächster Zeit die Software für weitere wichtige Daten zu erweitern. Schlussendlich möchte ich mit der Software die PID-Reglerwerte für meinen Quadrocopter genau einstellen können.
Auf in die zweite Runde!
